近期,我院吴瑞琪博士首次以我校为第一单位在IEEE旗下Trans系列的顶级期刊《IEEE Transactions on Industrial Informatics》(中科院一区Top,2022年影响因子:12.3)上发表题为"Internal Model Control Structure inspired Robotic Calligraphy System"(DOI:10.1109/TII.2023.3295415)的研究文章。该成果为复杂图像处理与理解团队与厦门大学媒体分析与计算实验室的共同研究成果,河南工业大学人工智能与大数据学院为第一署名单位,复杂图像处理与理解团队成员和媒体分析与计算实验室团队成员为共同作者。
该成果针对机器人学习书法技能的复杂性提出了一种创新的解决方案。吴瑞琪博士在解决方案中提出一种基于机器人手眼协调方法的书法机器人控制框架,以解决现有方法存在的计算成本高和生成结果多样性有限等限制。受内模控制(IMC)系统的启发,该方案构建了一个视觉--运动网络和一个运动--视觉网络,分别模拟机器人手眼协调的直接模型和逆向模型。主要框架如图1所示,视觉--运动网络作为动作生成器,将图像输入转化为机器人动作,而运动--视觉网络则辅助视觉-运动网络的训练。通过机械臂的随机书写,建立了运动-视觉网络的预训练。实验结果表明,该方法能够成功地通过输入目标笔画图像来书写汉字的笔画。尽管该方法是应用于机器人书法,但其底层研究也可适用于许多其他应用,例如机器人的运动模仿。
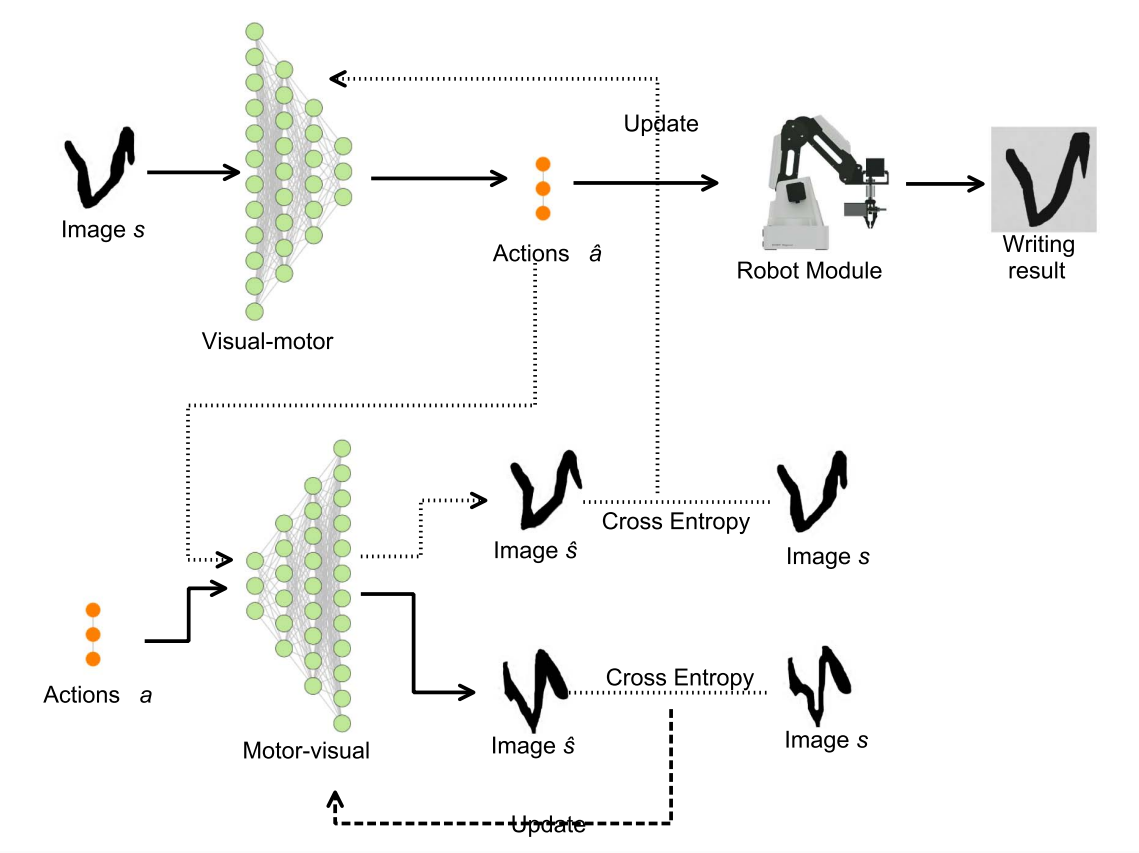
图1.基于内膜控制和手眼协调的机器人书写方法框架图。
期刊简介:《IEEE Transactions on Industrial Informatics》为IEEE旗下Trans系列的顶级期刊,侧重于以知识为基础的工业自动化作为一种手段,以提高工业制造和制造过程。该期刊的范围主要涉及计算机控制系统、机器人、工程、智能制造、视觉系统、数据采集与信号处理等信息学前沿技术,及其在计算机、通信、电路、电磁、电力、机器人、控制、信号、交通等领域的应用,是计算机与工业研究领域的顶级期刊。该刊已被SCI、SCIE数据库收录,在中科院JCR最新升级版分区表中,该刊分区信息为大类计算机科学1区TOP,在自动化与控制系统、计算机:跨学科应用、工程:工业等小类分区中也均为1区,2022年影响因子为12.3。






